Quadrotor Videos
About:
Recently there has been an increased interest in the development of autonomous flying vehicles. Whereas most of the proposed approaches are suitable for outdoor operation, only a few techniques have been designed for indoor environments, where the systems cannot rely on GPS and therefore have to use their exteroceptive sensors for navigation. Here, we present videos demonstrating our general navigation system which enables a small-sized quadrotor systems to autonomously operate in indoor environments. To achieve this, we systematically extend and adapting techniques which have been successfully applied on ground robots.
Related documents:
PhdThesis: Mapping, State Estimation, and Navigation for Quadrotors and Human-Worn Sensor Systems
TRO Journal paper (2012): A Fully Autonomous Indoor Quadrotor
RSS WS Paper (2011): 3D Place Recognition and Object Detection using a Small-Sized Quadrotor
ICRA 09: Towards a Navigation System for Autonomous Indoor Flying
see also www.slawomir.de
You will find a couple of videos on this page - All videos are encoded with the Xvid codec
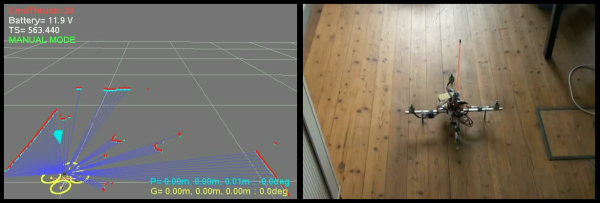
Particle filter based localization in a known map:
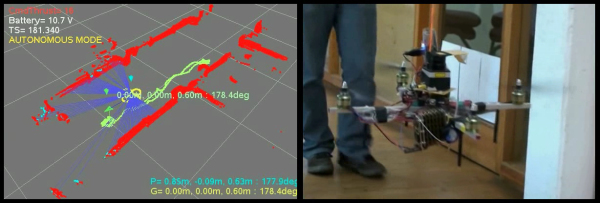
A previously build map is used for localization. Each black dot shows a possible pose of the quadrotor, the green dot together with the red laser beams highlight the current best pose estimate.
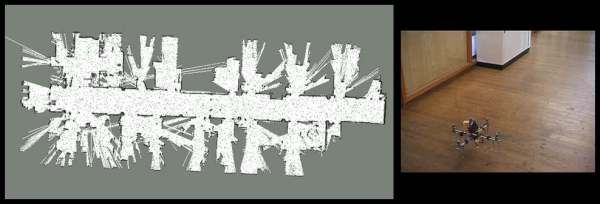
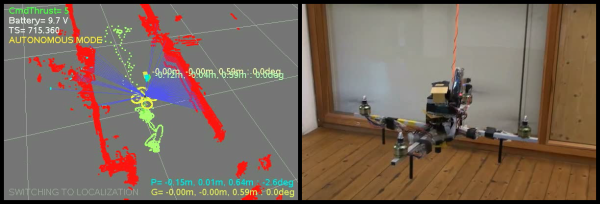
We continued by implementing simultaneous localization and mapping (SLAM) and pose stability algorithms. A small example can be seen here:
and a larger example here:
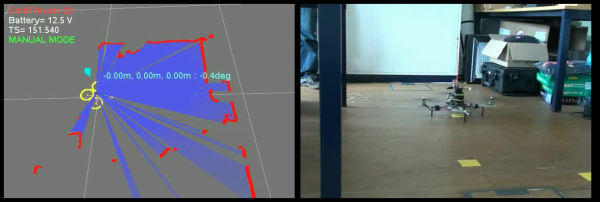
Since our aim is to have a fully autonomous indoor quadrotor we decided to extend the SLAM towards z-direction. This enables us to map obstacles in height resulting in a multi-level SLAM as shown in here:
A flight including dynamic obstacle avoidance can be seen here:
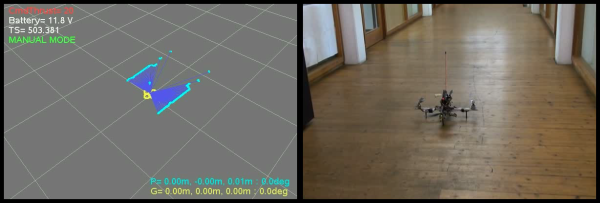
Recently, we also equipped a fuel-cell from TU-Berlin powering the on-board modules (i.e., gumstix, Hokuyo Laser, XSens IMU..). An autonomous flight of the system can be seen here: